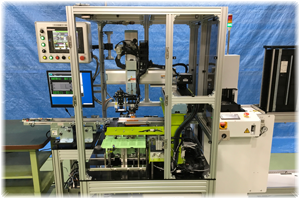
直交ロボットのZ軸の画像カメラで基板を撮影し位置補正を行い、ロムを圧入します。 ロム搬送中、下部に設けられたカメラではロムの足の状態を検査しNG品は圧入しません。 仮圧入後CMOSレーザーセンサーで足の曲りも検査できる高度な装置です。
×